Procedural Animation
Examples
-
-
Walkthrough 'Tripod Monster' .
-
Parental and Deform techniques are used.
-
Inverse Kinematics is not explained, but it is a very good intermediate video explaining the whole workflow.
-
-
Walkthrough 'Biped Monster with Reverse-joint Legs' (knee turned backwards) .
-
This video is quite interesting.
-
Several Inverse Kinematics setups are shown, without explanation.
-
Creating a dynamic articulated tail with 'Curves + Array'.
-
-
Walkthrough 'Biped Monster with Digitigrade Legs' (knee turned forwards) .
-
Inverse Kinematics is explained.
-
-
Game References for 2D Procedural Animations
-
-
I don't know if it necessarily uses it, but still very cool.
-
I think the creatures use it.
-
-
-
Rain.
-
Slugcat.
-
-
-
Vines.
-
Rain.
-
-
-
Ragdoll of the player character and enemies.
-
3D
-
-
The video is basically the application of the 'Foot Placement Method'.
-
Top-Down
Platform
-
Tentacle creature in Rain World .
-
Very interesting video.
-
The number of tentacles stuck to something affects how much the creature is affected by gravity. Meanwhile, the creature technically moves freely through space.
-
Pathfinding :
-
AStar, grid-based.
-
-
Physics :
-
Home made.
-
-
Climbing :
-
Score for each grab position.
-
It does not reach all positions, only the closest ones. If a new position is better than the previous one, then switch to the new one.
-
-
-
Legs .
Complementary Techniques
Movement transitions
Etc
Inverse Kinematics
IK with Foot Placement
-
-
Very interesting.
-
It also talks about using Bird-oid path finding, which is impressive , removing the need to make pathfinding algorithms.
-
Discussion
-
Handmade Hero#Chat 7 - Inverse Kinematics .
-
TLDR :
-
He does not show any equations or discuss any specific technique.
-
The video is basically to demonstrate the nature and difficulty of the problem.
-
-
Physics Engines
-
Box2D and Jolt Physics are both rigid-body physics engines that simulate dynamic behavior using constraints and impulses. Neither has native support for inverse kinematics (IK), which typically requires solving joint positions/angles to reach a target.
-
However, you can implement IK logic on top of these engines by manually controlling joint angles and positions before feeding them to the simulation, or using constraints in a controlled way.
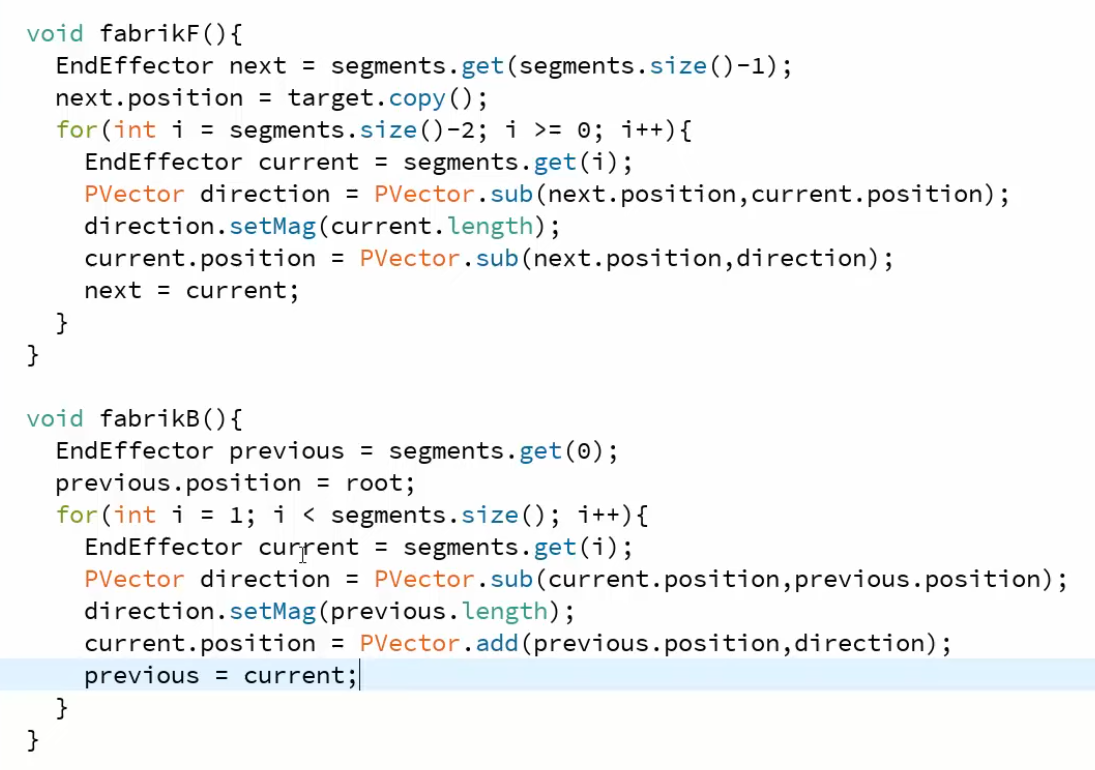
FABRIK (Forward And Backwards Reaching Inverse Kinematics)
-
How it Works:
-
A two-pass iterative method that moves joints forward and backward to reach the target.
-
Forward pass: Stretches the chain from the root toward the target.
-
Backward pass: Contracts it back from the target to the root.
-
Repeats until the end-effector is close enough.
-
-
Pros:
-
Fast & simple (no Jacobians or heavy math).
-
Works well with constraints (joint limits, obstacles).
-
Natural-looking motion (good for animation).
-
-
Cons:
-
Not as precise for orientation control.
-
Can struggle with highly constrained systems.
-
-
Used in:
-
Games (Unity's IK solvers), animation tools.
-
-
Visual behavior :
-
Produces smooth, natural arcs (like a human arm reaching).
-
Tends to avoid extreme joint angles.
-
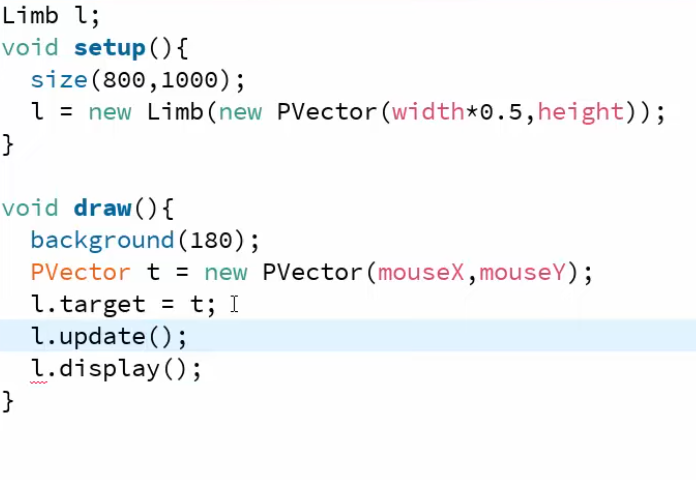
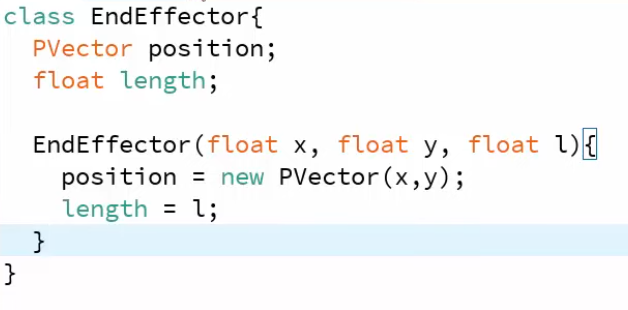
FABRIK
-
FABRIK demo and implementation .
-
I believe it uses distances, purely approximating one point to another until it is close enough.
-
I'm not certain about this, I haven't watched the entire video.
-
-
 .
.
-
 .
.
-
 .
.
-
-
-
It uses vectors, inverting the vector and repositioning it at each step.
-
-
-
The lib has tons of scripts.
#include <ik/ik.h> int main() { /* Create a solver using the FABRIK algorithm */ struct ik_solver_t* solver = ik.solver.create(IK_FABRIK); /* Create a simple 3-bone structure */ struct ik_node_t* root = solver->node->create(0); struct ik_node_t* child1 = solver->node->create_child(1, root); struct ik_node_t* child2 = solver->node->create_child(2, child1); struct ik_node_t* child3 = solver->node->create_child(3, child2); /* Set node positions in local space so they form a straight line in the Y direction*/ child1->position = ik.vec3.vec3(0, 10, 0); child2->position = ik.vec3.vec3(0, 10, 0); child3->position = ik.vec3.vec3(0, 10, 0); /* Attach an effector at the end */ struct ik_effector_t* eff = solver->effector->create(); solver->effector->attach(eff, child3); /* set the target position of the effector to be somewhere within range */ eff->target_position = ik.vec3.vec3(2, -3, 5); /* We want to calculate rotations as well as positions */ solver->flags |= IK_ENABLE_TARGET_ROTATIONS; /* Assign our tree to the solver, rebuild data and calculate solution */ ik.solver.set_tree(solver, root); ik.solver.rebuild_data(solver); ik.solver.solve(solver); } -
Chained Constraint
-
-
Very cool video.
-
I like the strategy used to draw the creature's outline.
-
-
-
It does exactly the same thing as the video above, but it is more "cult" / "classical music" / "3blue1brown" and less explanatory.
-
"uuuh parametric equations uhhh
8^P"
-
-
The method used to draw is the same as the video above, but the style became more GREY.
-
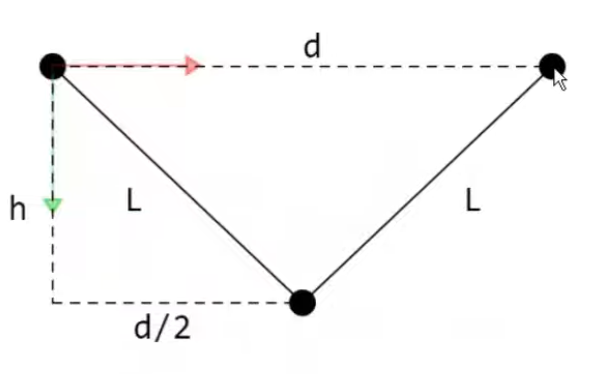
Two-Joint IK / Two-Bone IK / Triangulation
-
-
 .
.
-
-
How it Works:
-
Treats a two-joint chain (like an elbow/knee) as a triangle.
-
Uses the law of cosines to compute angles.
-
Adjusts the middle joint to reach the target.
-
-
Pros:
-
Blazing fast (perfect for real-time use).
-
Stable & predictable (no iteration needed).
-
-
Cons:
-
Only works for 2-joint chains (e.g., a knee or elbow).
-
-
Used in:
-
Game character limbs (Unity’s "Two-Bone IK").
-
Math
CCD (Cyclic Coordinate Descent)
-
How it Works:
-
Iteratively adjusts one joint at a time, starting from the end-effector and moving backward.
-
Each joint rotates to point the end-effector toward the target.
-
Repeats until the end-effector is close enough.
-
-
Pros :
-
Simple & efficient (no matrix math).
-
Works well for chains with few joints.
-
-
Cons :
-
Can produce unnatural twisting (since it solves joints one by one).
-
Slower for long chains (many iterations needed).
-
-
Used in :
-
Early game IK, simple robotic arms.
-
-
Visual Behavior :
-
Can look "robotic" or mechanical (joints may twist unnaturally).
-
May over-rotate joints in long chains.
-
-
Comparing to FABRIK :
-
Constraints :
-
FABRIK is better for constrained systems (e.g., human limbs).
-
CCD is harder to limit joint angles (since it works in rotations). Can break constraints if not carefully tuned.
-
-
Performance :
-
FABRIK is generally faster, especially for long chains.
-
CCD is slower for long chains (needs more iterations). Can oscillate near the target (takes time to settle).
-
-
Implementation :
-
CCD is simpler to code, but FABRIK is more polished.
-
-
FABRIK is the better choice for most cases (games, animation, robotics).
-
Use CCD if you need a quick and dirty solution.
-